Within wayfinding and navigation tasks, the use of landmarks has been found to be a key aspect. In particular pedestrian instructions should focus on the delivery of “landmarks” to aid in navigation. Still the use of landmarks is not common in many navigation systems. The salience of features is an important aspect of whether they can be used as landmarks. OpenStreetMap (OSM) contains a vast amount of geospatial information that can be tapped into for identifying these landmark features. A recently published paper (Rousell & Zipf 2017) presents a prototype navigation service extending OpenRouteService (Schmitz et al. 2008) that extracts landmarks suitable for navigation instructions from the OSM dataset based on several metrics.
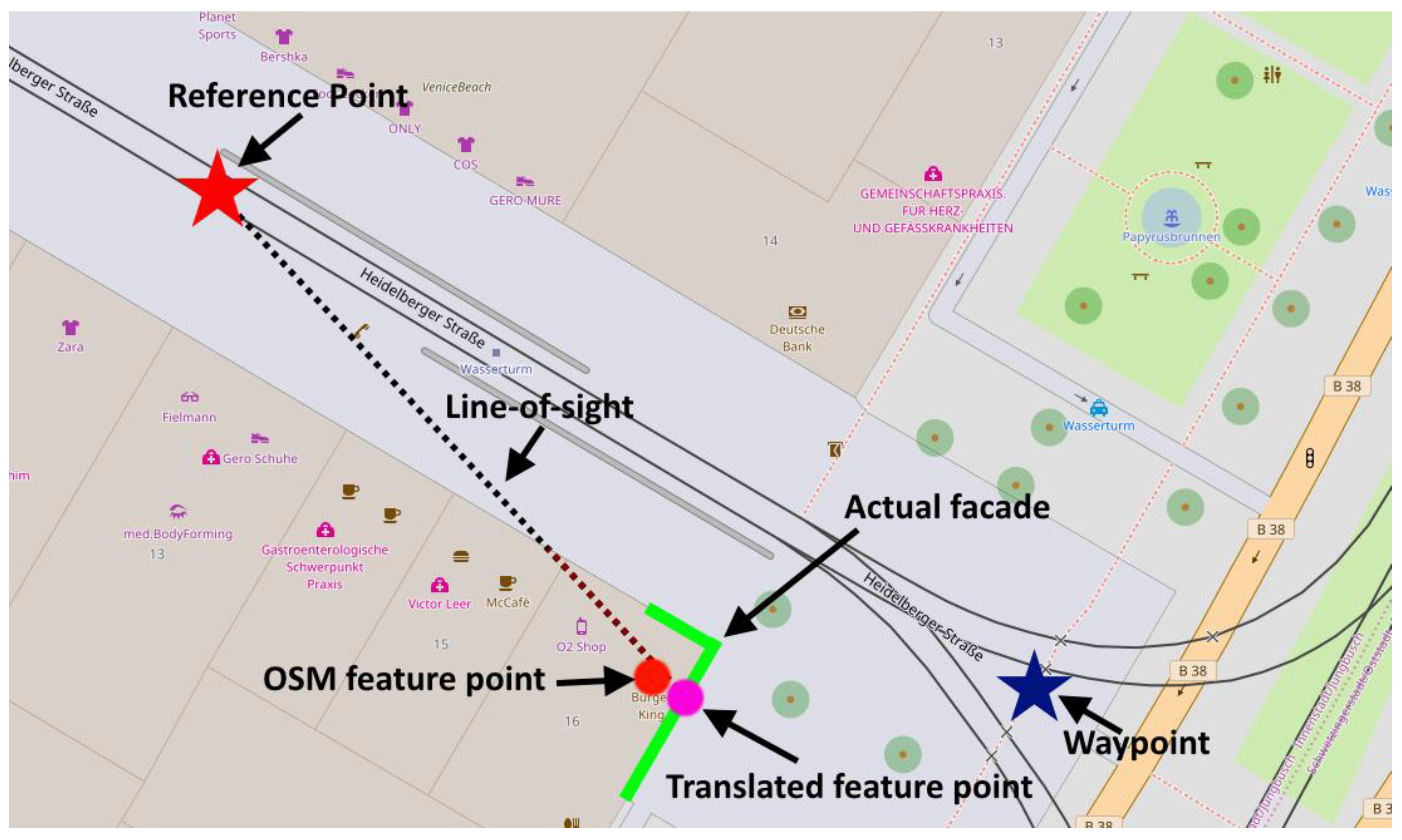
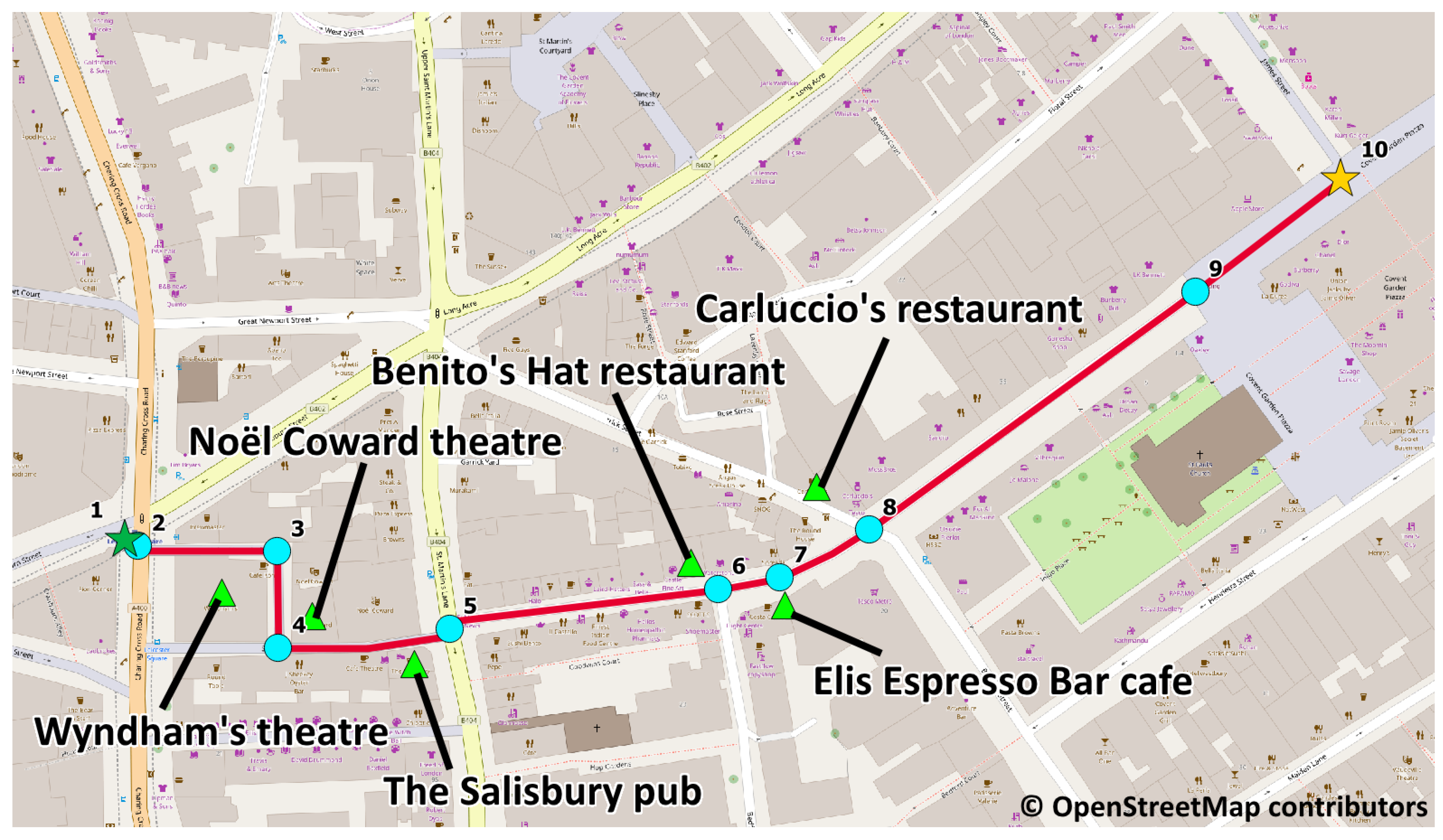
As identified in the literature, it is clear that to successfully extract landmarks from a set of features, it is important to take into account several characteristics, such as distance from the decision point and the visual saliency of the feature. Based on the prior literature, several methods have been implemented within the navigation service currently being developed in an attempt to identify and deliver landmarks in routing instructions. Using OSM the landmark identification process implemented in this prototype focusses on the identification of six primary attributes of a landmark candidate:
visual/semantic saliency, distance from waypoint, visibility, position, location, and uniqueness.
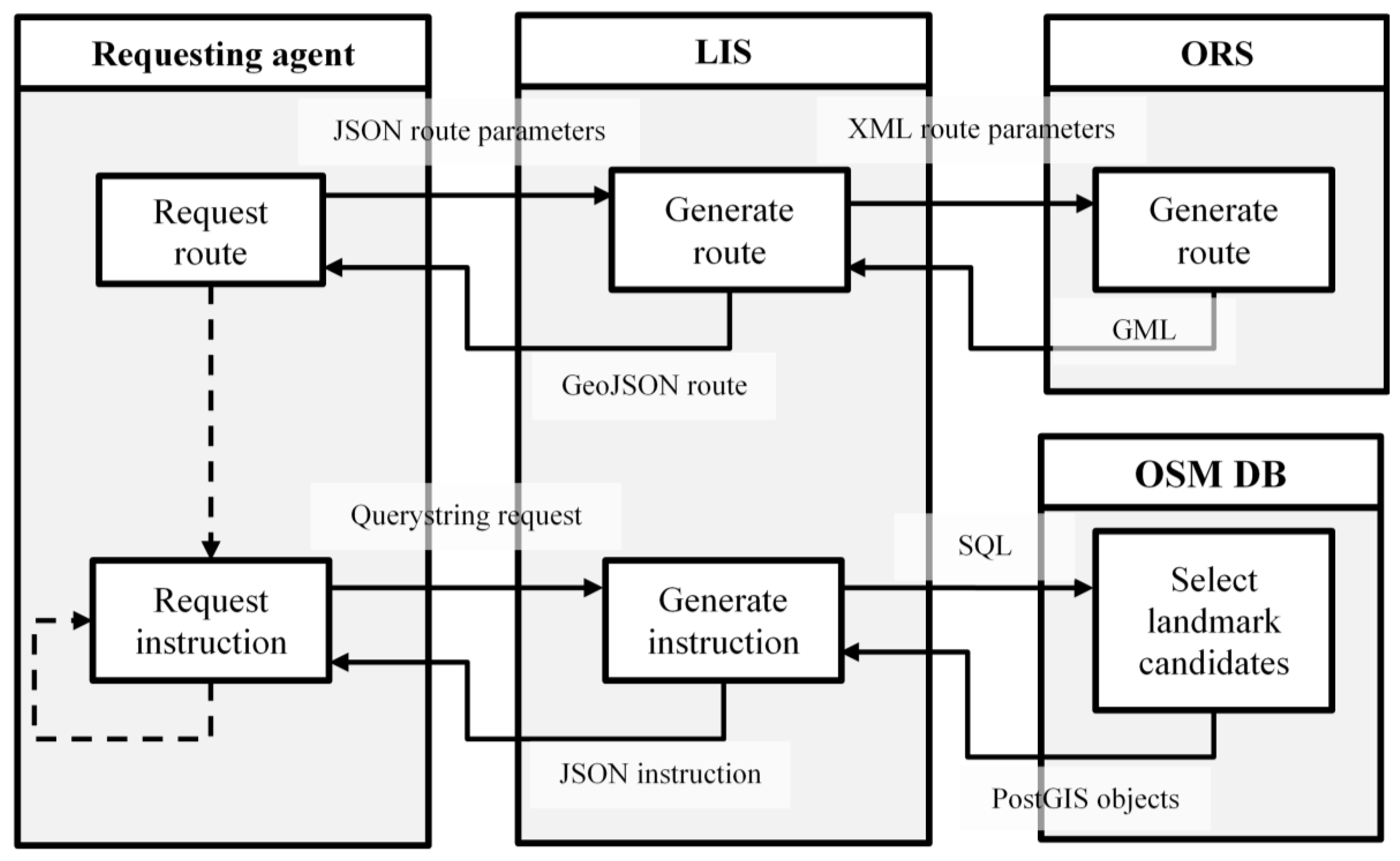
All of the required information is available from the OSM dataset. All calculations are performed automatically and require no additional input other than this single dataset.
This is coupled with a short comparison of landmark availability within OSM, differences in routes between locations with different levels of OSM completeness and a short evaluation of the suitability of the landmarks provided by the prototype. Landmark extraction is performed on a server-side service, with the instructions being delivered to a pedestrian navigation application running on an Android mobile device.
Rousell A. and Zipf A. (2017): Towards a landmark based pedestrian navigation service using OSM data. International Journal of Geo-Information, ISPRS IJGI. 6(3), 64; doi:10.3390/ijgi6030064
Acknowledgments
A part of the research leading to these results has received funding from the European Community’s Seventh Framework Programme (FP7/2007-2013) under Grant Agreement No. 612096 (CAP4Access). OpenRouteService supported by HeiGIT, core-funded by the Klaus Tschira Foundation, KTS, Heidelberg.
OpenRouteService:
Schmitz S, A Zipf, P Neis (2008): New applications based on collaborative geodata—the case of routing. Proceedings of XXVIII INCA International Congress on Collaborative Mapping and Space Technology. Gandhinagar, Gujarat, India.
Further related work deals e.g. with routing for users with special requirements such as impaired persons, including routing through polygons. (Zipf et al 2016).
Zipf, A., Mobasheri, A., Rousell, A., Hahmann, S. (2016): Crowdsourcing for individual needs – the case of routing and navigation for mobility-impaired persons. In: Capineri, C, Haklay, M, Huang, H, Antoniou, V, Kettunen, J, Ostermann, F and Purves, R. (eds.): European Handbook of Crowdsourced Geographic Information, p. 325–337. London: Ubiquity Press. DOI: dx.doi.org/10.5334/bax.x