

In the SYSSIFOSS project, we are investigating how we can take advantage of virtual laser scanning (VLS), the simulation of laser scanning in a computer environment, in forestry applications. These applications include survey planning and optimization, sensitivity analyses, and algorithm development. For example, VLS may be used to investigate the influence of different sensor and platform configurations on the resulting point cloud and the forestry information that can be obtained from it. Furthermore, VLS data with perfect ground truth may serve as training and testing data for machine learning in application fields such as tree detection or tree segmentation. With the Heidelberg LiDAR Operations Simulator HELIOS++, we developed an open-source tool for VLS.
One important requirement for meaningful VLS is an appropriate representation of the objects, in this case of trees. In our brand new paper, we present our results from investigating different voxel representations of trees for VLS.
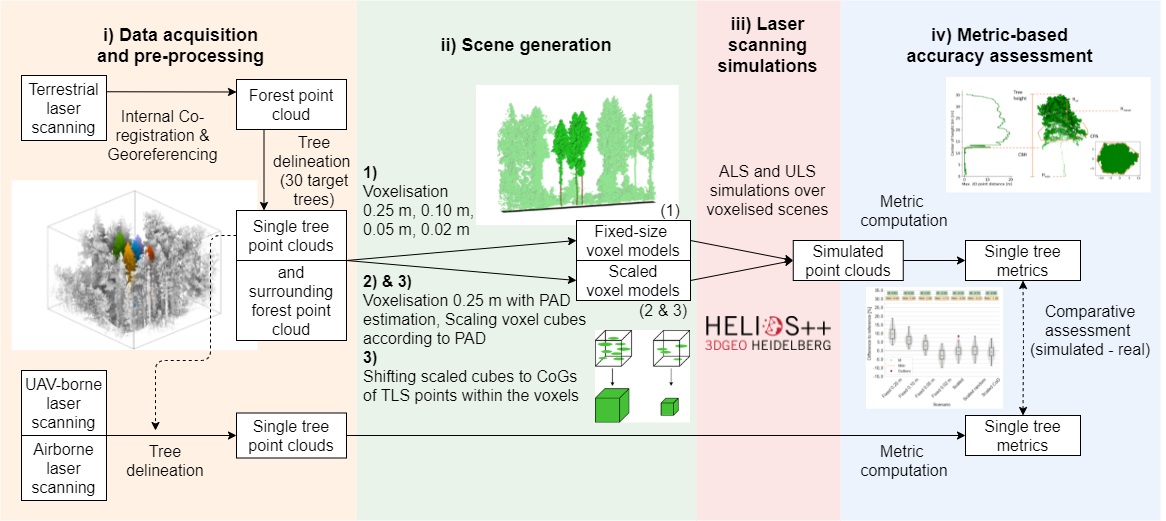
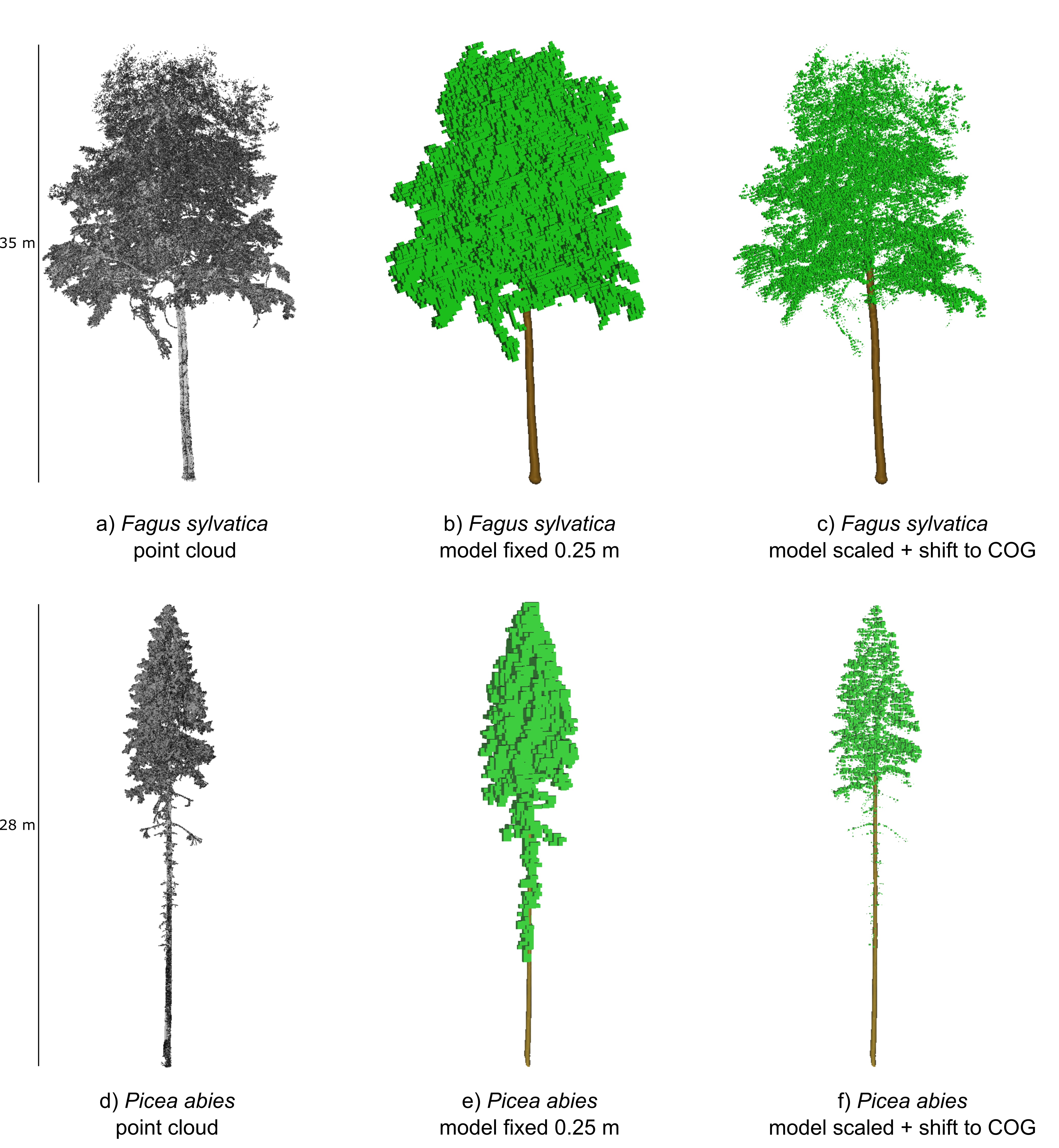
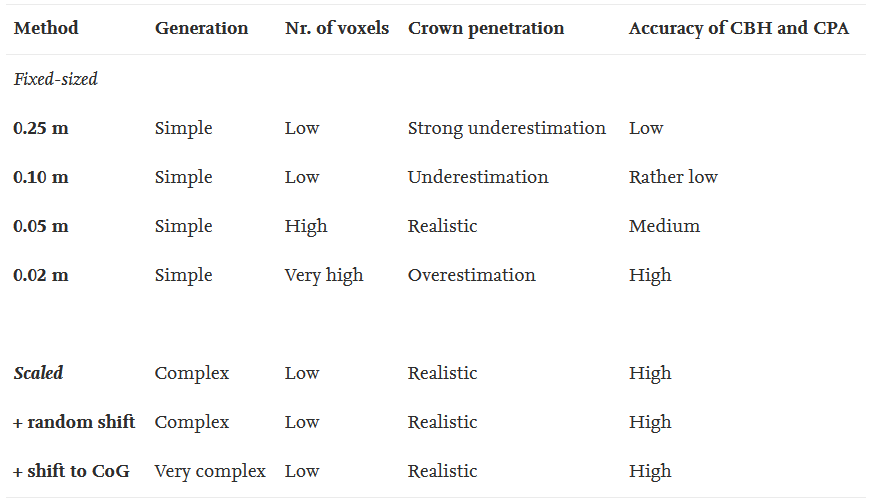
These representations include fixed-sized voxels of different voxel sizes and voxels scaled by local plant area density estimates.
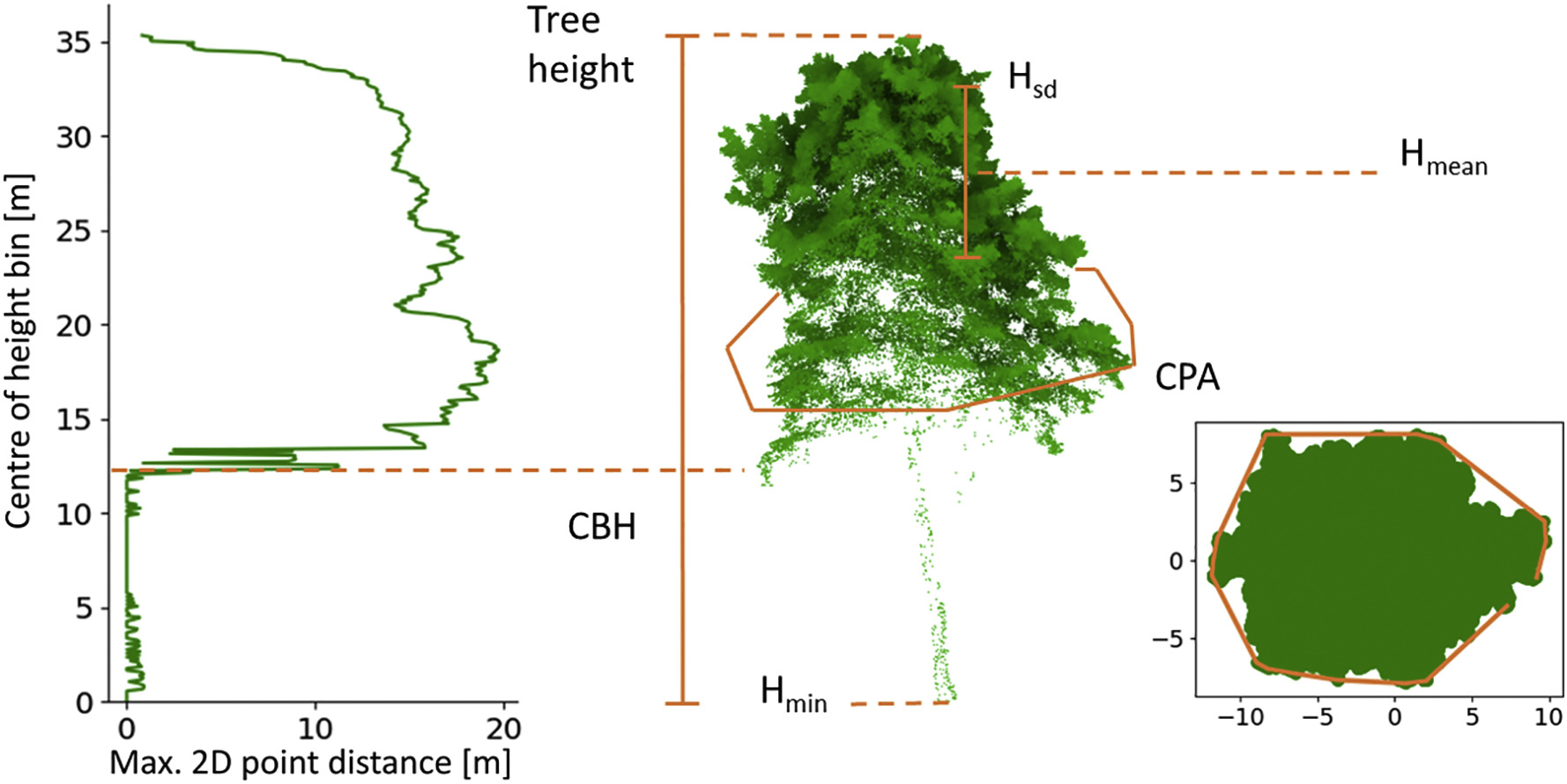
By mimicking our real ALS and ULS laser scanning acquisitions from 2019 (see this post and our PANGAEA dataset) in simulations, we analyzed how accurate point cloud and tree metrics can be estimated from simulated point clouds using different voxel representations.
Simulations were performed with the open-source software HELIOS++, which is available on GitHub.
We found out that dynamically scaling voxels using voxel-based estimates of plant area density allows simulating realistic point clouds while using a relatively coarse voxel grid. This reduces computational load compared to a fine voxel grid of regular fixed-sized voxels.
The paper is available under open access and CC-BY 4.0 clause here: https://doi.org/10.1016/j.rse.2021.112641.
Weiser, H., Winiwarter, L., Anders, K., Fassnacht, F.E. & Höfle, B. (2021): Opaque voxel-based tree models for virtual laser scanning in forestry applications. Remote Sensing of Environment. Vol. 265, pp. 112641.
The accompanying data and code are available on heiDATA: https://doi.org/10.11588/data/MZBO7T.
SYSSIFOSS is a joint project between the Institute of Geography and Geoecology (IFGG) of the Karlsruhe Institute of Technology (KIT) and the 3DGeo Research Group of Heidelberg University. The project is funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) – project number: 411263134. Find further details about the SYSSIFOSS project on the project website, in recent blogposts, or on Twitter (#SYSSIFOSS).
![]()