

Tag: LiDAR simulation
-

Major HELIOS++ Release: v2.0.0
We are happy to release a new major version of HELIOS++: https://github.com/3dgeo-heidelberg/helios/releases What’s new in this release? Installation The new way to install HELIOS++ is via the conda or mamba package managers. We recommend mamba or micromamba. After creating a dedicated Python environment for your HELIOS++ project and activating it, run: mamba install helios or…
-
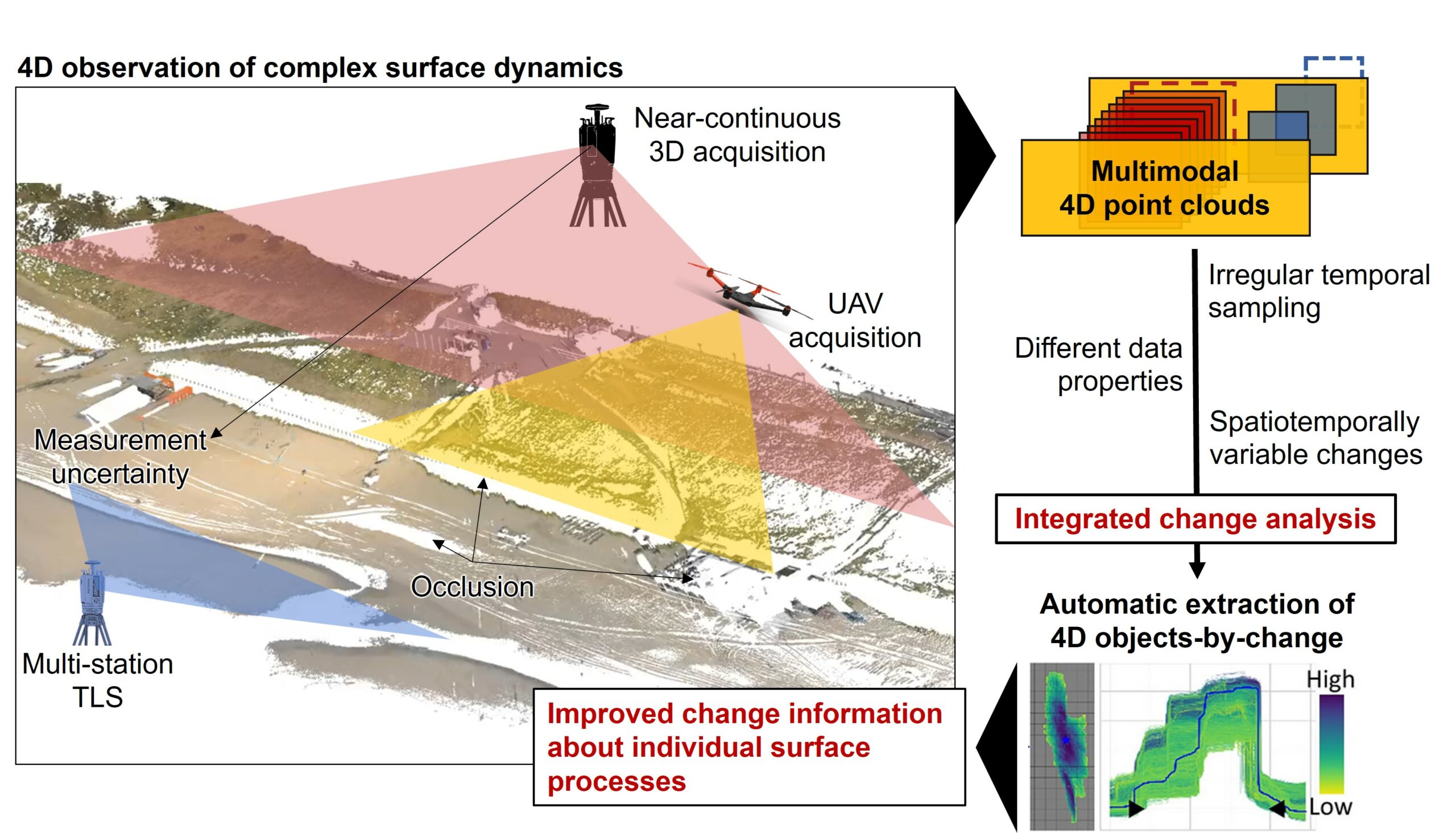
Kick-off: Extract4D Project
Last week, we, 3DGeo Heidelberg (Prof. Dr. Bernhard Höfle), had a kick-off meeting for our new joint research project Extract4D, led by Prof. Dr. Katharina Anders (TU Munich, Remote Sensing Applications). Here is a sneak peek at this exciting research project. Background The Earth’s surface is constantly being shaped by wind, water and gravity. Observing…
-
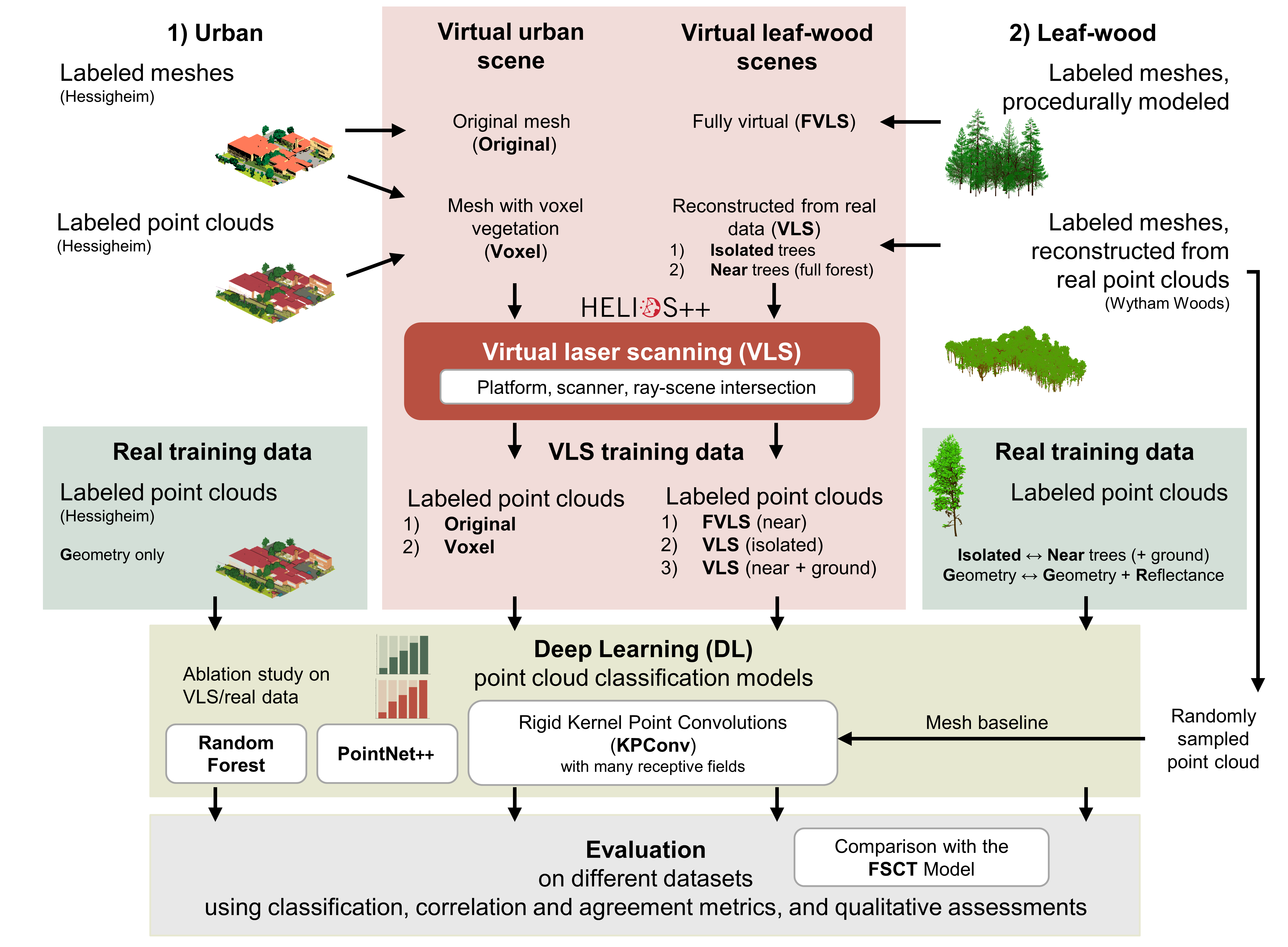
Deep learning with simulated laser scanning data for 3D point cloud classification
Esmorís, A.M., Weiser, H., Winiwarter, L., Cabaleiro, J.C. & Höfle, B. (2024): Deep learning with simulated laser scanning data for 3D point cloud classification. ISPRS Journal of Photogrammetry and Remote Sensing. Vol. 215, pp. 192-213. DOI: 10.1016/j.isprsjprs.2024.06.018 3D point clouds acquired by laser scanning are invaluable for the analysis of geographic phenomena. To extract information…
-
New paper on the potential of simulated laser scanning and field data to train forest biomass models
In great collaboration with colleagues from Karlsruhe (DE), Vienna (AT), Brno (CZ), Leipzig (DE), Raszyn (PL), and Berlin (DE), we published a paper investigating approaches to improve LiDAR-based biomass models when only limited sample plots with field data are available. The main work was carried out by PhD student Jannika Schäfer (IFGG, Karlsruhe Institute of…
-
DFG Software Grant
Successful proposal: Fostering a community-driven and sustainable HELIOS++ scientific software The 3DGeo Group and the Scientific Software Center (SSC) of Heidelberg University have been successful with their proposal in the DFG call “Research Software – Quality assured and re-usable”, together with two other project proposals at Heidelberg University (see press release). The main objective of…
-

🦇 Halloween release of HELIOS++, v1.3.0
We proudly present our Halloween release of HELIOS++, Version 1.3.0: https://github.com/3dgeo-heidelberg/helios/releases What’s new in this release? HELIOS++ now supports LiDAR simulation of dynamic scenes. We can now simulate laser scanning of scenes that change during the simulation. This is done by introducing rigid motions, which are defined with XML syntax in the scene XML file.…
-
Introducing the VirtuaLearn3D Project
With VirtuaLearn3D (Virtual Laser Scanning for Machine Learning Algorithms in Geographic 3D Point Cloud Analysis), a new project of the 3DGeo group has started. The focus of this project is to enable powerful machine learning algorithms for geographic point cloud analysis by advancing the concept of virtual laser scanning to overcome the lack of training…
-
Improved Performance of HELIOS++ using High Performance Computing Techniques
The software HELIOS++ simulates the laser scanning of a given virtual scene that can be composed of different spatial primitives and 3D meshes with distinct granularity. The high computational cost of this type of simulation software demands efficient computational solutions. Classical solutions based on GPU are not well suited when irregular geometries compose the scene…
-
Einführung in die Laserscanning-Simulationssoftware HELIOS++ bei der FOSSGIS Konferenz 2022
Vom 9. bis zum 12. März 2022 findet die jährliche FOSSGIS Konferenz statt, die führende Konferenz für Freie und Open Source Software für Geoinformationssysteme und Open Data im deutschsprachigen Raum. Im Themenbereich 3D und LiDAR wird die 3DGeo Gruppe mit Beiträgen zur Open Source Software HELIOS++ vertreten sein, die der Simulation von Laserscanning dient. Am Freitag,…
-
New paper: Opaque voxel-based tree models for virtual laser scanning in forestry applications
In the SYSSIFOSS project, we are investigating how we can take advantage of virtual laser scanning (VLS), the simulation of laser scanning in a computer environment, in forestry applications. These applications include survey planning and optimization, sensitivity analyses, and algorithm development. For example, VLS may be used to investigate the influence of different sensor and…
-
SYSSIFOSS at EGU21 on 26 April
From 19 to 30 April 2021, European researchers from the Earth, planetary and space sciences are gathering in the virtual European Geosciences Union (EGU) assembly. On Monday, 26 April, two SYSSIFOSS presentations will be opening the block “Point clouds for forestry applications” in session BG11 – Remote sensing for forest applications. Dr. Fabian E. Fassnacht…
-
HELIOS++ 1.0.0 Software & Preprint Release
The 3DGeo Research Group is proud to announce the release of their novel ray-tracing based laser scanning simulator HELIOS++! HELIOS++ is a general-purpose simulation software for virtual laser scanning data acquisition. Such data can be used to complement real data in many use cases. Some examples include the generation of training data for machine learning,…