

Our forest laser scanning dataset collected in the frame of the SYSSIFOSS project is now openly available through the PANGAEA Data Publisher:
Weiser, H., Schäfer, J., Winiwarter, L., et al. (2021): Terrestrial, UAV-borne and airborne laser scanning point clouds of central European forest plots, Germany, with extracted individual trees and manual forest inventory measurements. PANGAEA, https://doi.org/10.1594/PANGAEA.933426
Until the DOI is registered, the dataset can be accessed here.
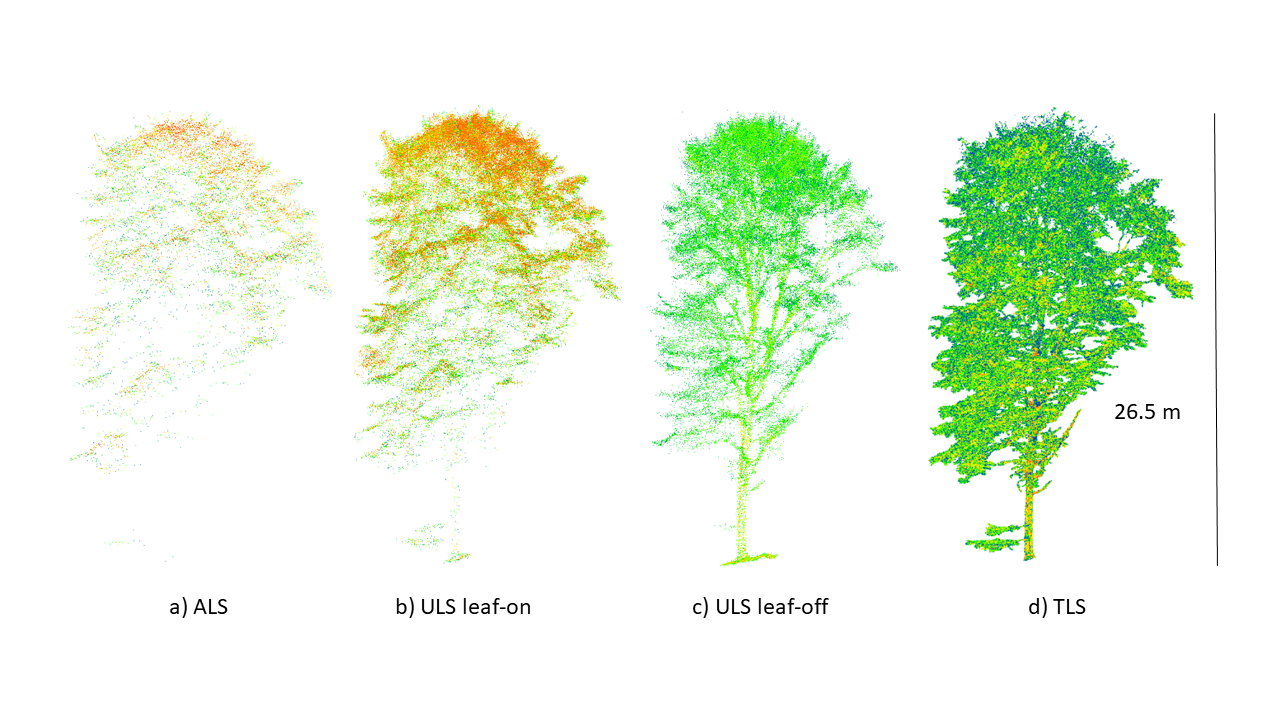
In 2019 and 2020, we acquired 3D forest data with laser scanners mounted on three different platforms: an aircraft, an uncrewed aerial vehicle (UAV) and a ground-based tripod. The point cloud datasets differ in their coverage, resolution and view directions. Airborne laser scanning (ALS) and terrestrial laser scanning (TLS) was conducted during summertime under leaf-on conditions. UAV-borne laser scanning (ULS) was performed both in summer and early spring, resulting in 3D point clouds of forests under leaf-on and leaf-off conditions. From the plot level datasets, we extracted point clouds of individual trees. We then computed tree properties from the point clouds, such as diameter at breast height (DBH), tree height or crown diameter. We measured the same properties in-situ, and identified the species of every tree.
Our final dataset encompasses 1491 trees. For the majority of trees, both ALS and ULS data is available. For 249 trees, point clouds from all three platforms are provided. Besides the larger area and the individual tree point clouds, we also provide the flight trajectories and scan positions, as well as all relevant metadata about the acquisitions and a documentation of our processing workflow.
Within our research project, we are building a database of the individual trees, which we will use to create synthetic 3D forest stands based on 2D forest inventory information. These scenes will be virtually scanned in HELIOS++, the Heidelberg LiDAR Operations Simulator. This way, we can create an abundance of realistic laser scanning datasets of forests with varying sensor configurations, acquisition settings and forest structures. Such simulated point clouds have numerous research applications, such as survey planning, algorithm development and machine learning.
SYSSIFOSS is a joint project between the Institute of Geography and Geoecology (IFGG) of the Karlsruhe Institute of Technology (KIT) and the 3DGeo Research Group of Heidelberg University. The project is funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) – project number: 411263134. Find further details about the SYSSIFOSS project on the project website, in recent blogposts, or on Twitter (#SYSSIFOSS).
![]()