

From 19 to 30 April 2021, European researchers from the Earth, planetary and space sciences are gathering in the virtual European Geosciences Union (EGU) assembly.
On Monday, 26 April, two SYSSIFOSS presentations will be opening the block “Point clouds for forestry applications” in session BG11 – Remote sensing for forest applications.
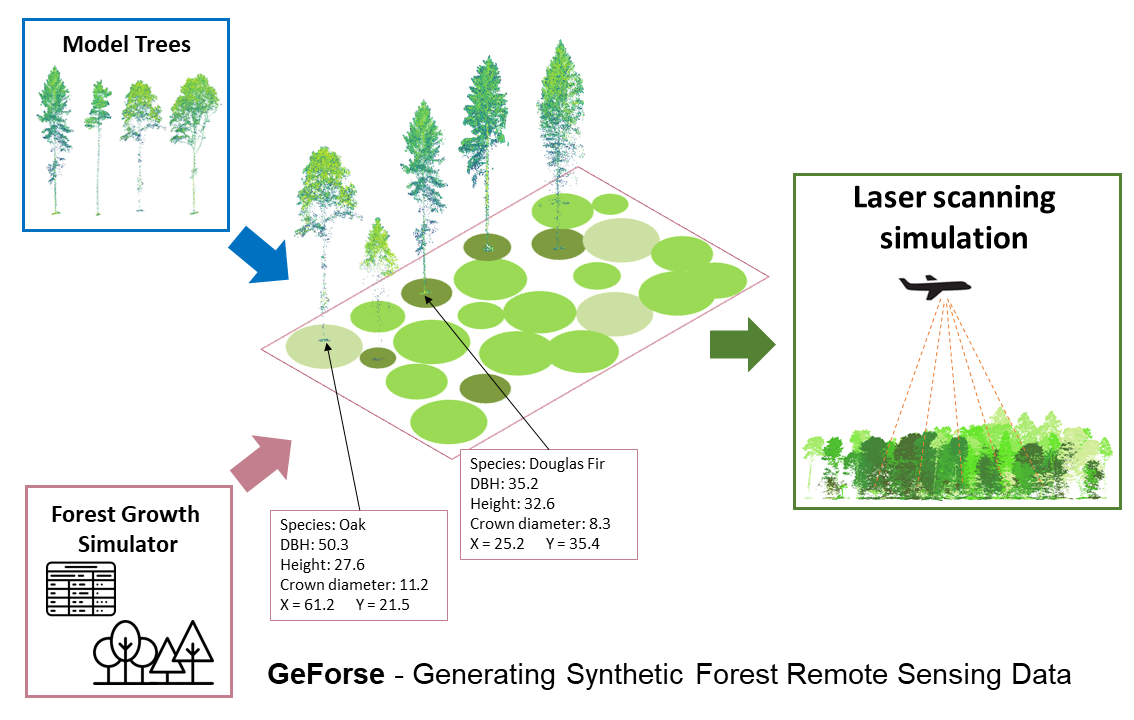
Dr. Fabian E. Fassnacht (KIT) will be Presenting the GeForse approach to create synthetic LiDAR data from simulated forest stands to optimize forest inventories in a 10-minute presentation. GeForse stands for “Generating Synthetic Forest Remote Sensing Data”. The approach combines a database of single tree point clouds extracted from real LiDAR data with the outputs of a single tree-based forest growth simulator, i.e. tree positions and tree properties, such as species, crown diameter and height. A synthetic 3D-forest is created by inserting a real point-cloud tree with matching properties to each simulated tree location. With the Heidelberg LiDAR Operations Simulator HELIOS++, LiDAR surveys with various acquisition settings and flight trajectories can be simulated over this synthetic 3D forest. Because tree properties of each tree in the simulated forest are known, this enables a wide variety of sensitivity analysis. In the presentation, we will give an overview of GeForse, briefly present a case study and provide an outlook on future applications of the approach.
The talk will be followed by a 2-minute presentation by Hannah Weiser on “Virtual laser scanning (VLS) in forestry – Investigating appropriate 3D representations for LiDAR simulations with HELIOS++”. Simulated laser scanning data is only realistic and useful if an adequate 3D representation of the forest is used in the simulation. In this context, we present our study investigating opaque voxel-based forest models computed from terrestrial laser scanning data using different voxel sizes. The point clouds from simulated LiDAR flights over different voxel models are compared with real reference laser scanning point clouds of the same trees using different metrics.
SYSSIFOSS is a joint project between the Institute of Geography and Geoecology (IFGG) of the Karlsruhe Institute of Technology (KIT) and the 3DGeo Research Group of Heidelberg University. It is furthermore closely linked to our software HELIOS++.
Find further details about the SYSSIFOSS project on the project website, in recent blogposts, or on Twitter (#SYSSIFOSS).
SYSSIFOSS is funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) – project number: 411263134.
![]()