

Members of the 3DGeo research group were recently taking advantage of the good weather to acquire some more data within the DFG-funded project SYSSIFOSS. We packed the drone and the RIEGL miniVUX-1UAV laser scanner, and drove to the forest near Bretten where 8 of our plots are located. In four days and 16 flights we collected LiDAR data from all 8 plots with a size of 1 ha each.


We immediately processed the UAV-borne laser scanning (ULS) data and compared it to point clouds that were acquired last summer, when the deciduous trees had their leaves. By looking into amplitude values in the leaf-off data, it is possible to visually distinguish between evergreen and deciduous trees, since the latter lose their leaves and the laser pulse is hitting small branches that have lower reflectance than leaves. This is even further emphasized when comparing it to the data from leaf-on conditions where leaves are on the trees, hence, the amplitude values are much higher.
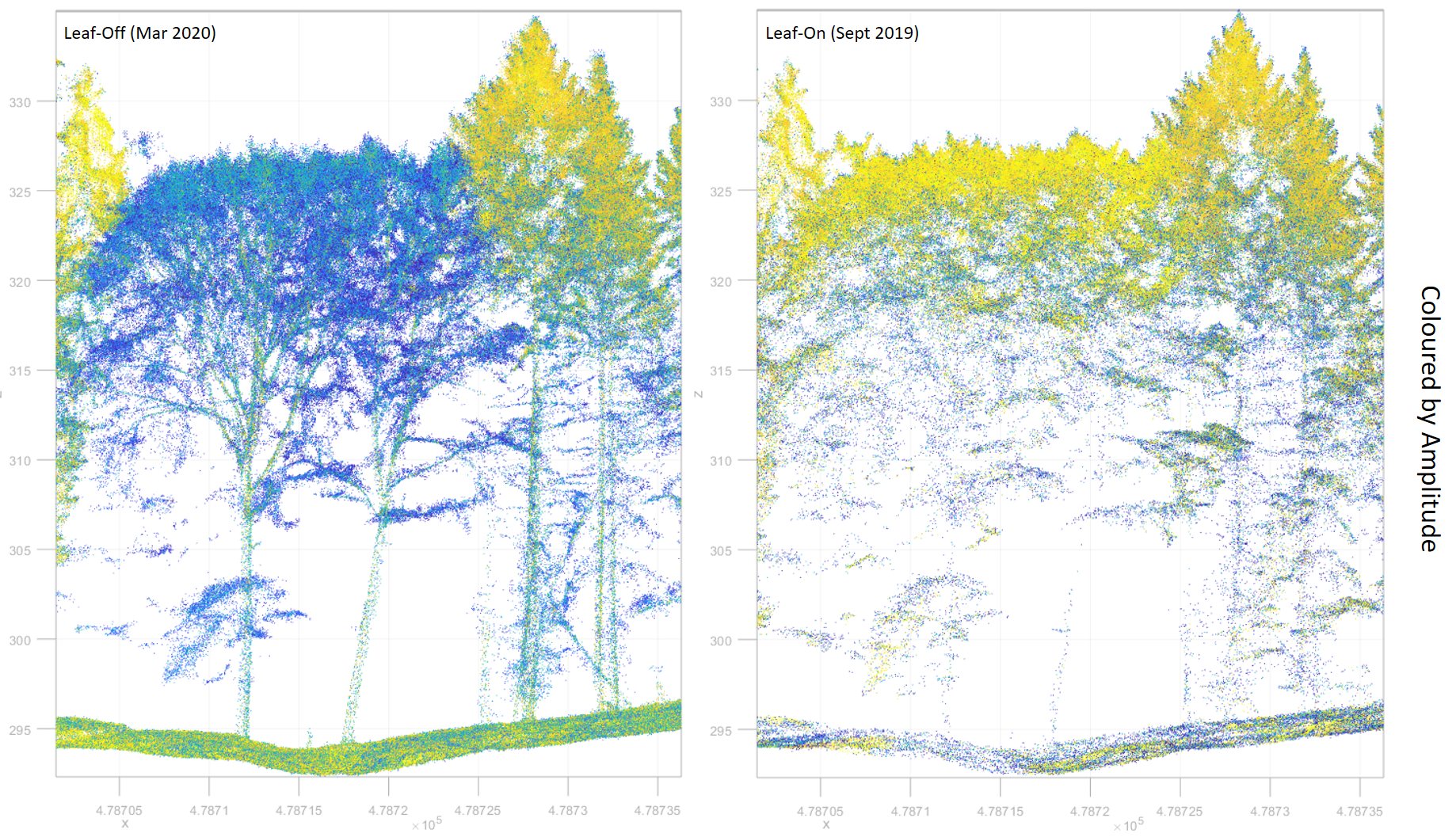
Another benefit of having leaf-off LiDAR data is the better penetration of the canopy, especially in case of deciduous trees, which results in higher point density in the lower parts of the forest. Thus, tree stems and branching structure as well as the ground and undergrowth are represented much more detailed, opening numerous new possibilities for further research using these datasets.
Within the SYSSIFOSS project, the ULS data will be aligned with the TLS data and then used for validating model trees extracted from the ALS data. Additionally, the point clouds of model trees will be inserted into our laser scanning simulator HELIOS where the effect of different flight planning settings will be investigated.
Find further details about the SYSSIFOSS project on the project website, in recent blogposts, or on Twitter (#SYSSIFOSS).
SYSSIFOSS is funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) – project number: 411263134.
![]()