

In close collaboration with the 3DGeo Research Group, Moritz Bruggisser of the Department of Geodesy and Geoinformation (RG Photogrammetry) presented his current research progress on the impact of acquisition patterns on the robustness and accuracy of tree models derived from UAV LiDAR for forest dynamic studies.
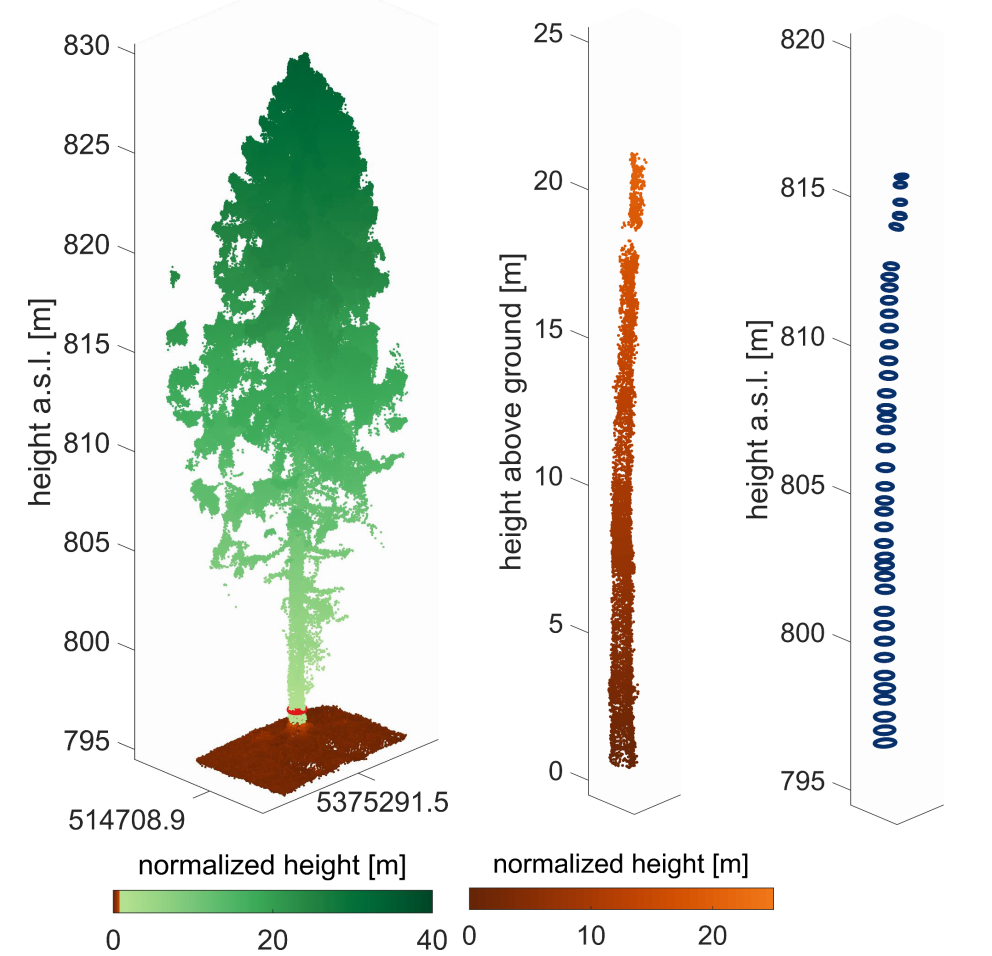
His work fits well into the scope of the SYSSIFOSS project, where forests are also acquired using UAV-based laser scanning (ULS). One key finding of the poster presented at the “3D Tree Models for Forest Dynamics” workshop was that UAV data can very well be used for tree diameter (DBH) estimation, but results in a higher RMSE when compared to terrestrial laser scanning data, and a lower completeness with regard to tree detection. However, ULS allows much faster capture of data and results in a more homogenous point density and sampling.
For more information, see the abstract.
Bruggisser, Moritz; Hollaus, Markus; Winiwarter, Lukas; Otepka, Johannes; Wang, Di; Höfle, Bernhard & Pfeifer, Norbert (2020): Impacts of acquisition patterns on the robustness and accuracy of tree models derived from UAV LiDAR for forest dynamic studies. 3D Tree Models for Forest Dynamics. Helsinki, Finland.
Find more details on the SYSSIFOSS project on the project website and in recent blog posts.