

Category: Research
-
LaVerDi Project: Integrating OSM and satellite data for landscape monitoring
This project explores how OpenStreetMap data can complement satellite imagery for tracking land cover changes in Germany. Using a small test area, we compare datasets over time to better understand how real-world changes are reflected in OSM—and how this knowledge can support automated monitoring. The Federal Agency for Cartography and Geodesy (BKG) has partnered with…
-
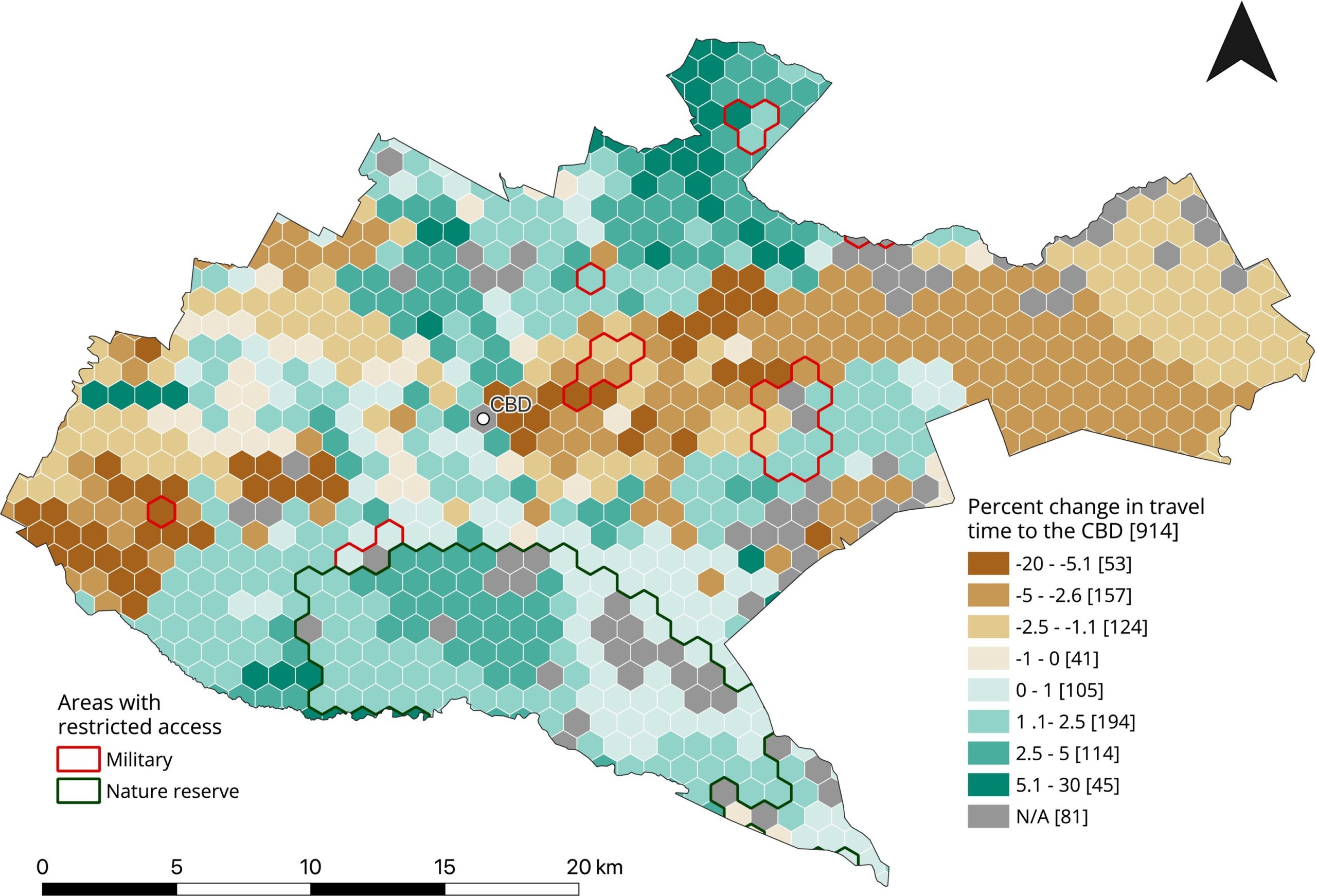
New Paper “Lessons in Traffic: Nairobi’s School Term Congestion and Equity Challenges”
This study, published at African Transport Studies, investigates the impact of school sessions on traffic congestion in Nairobi, highlighting how children’s mobility needs are often overlooked in transport planning. The paper explores how poor integration of school-related travel into urban transport planning contributes to traffic congestion in Nairobi. While the conventional response to congestion has…
-

3DGeo April Recap: Conferences
It was an exciting month for the 3DGeo research group in April. Three major conferences took place: Let’s give you some impressions below! JISDM The Joint International Symposium on Deformation Monitoring (JISDM) brings together experts on deformation monitoring from a range of fields such as photogrammetry, remote sensing and of course geodesy. It is a…
-
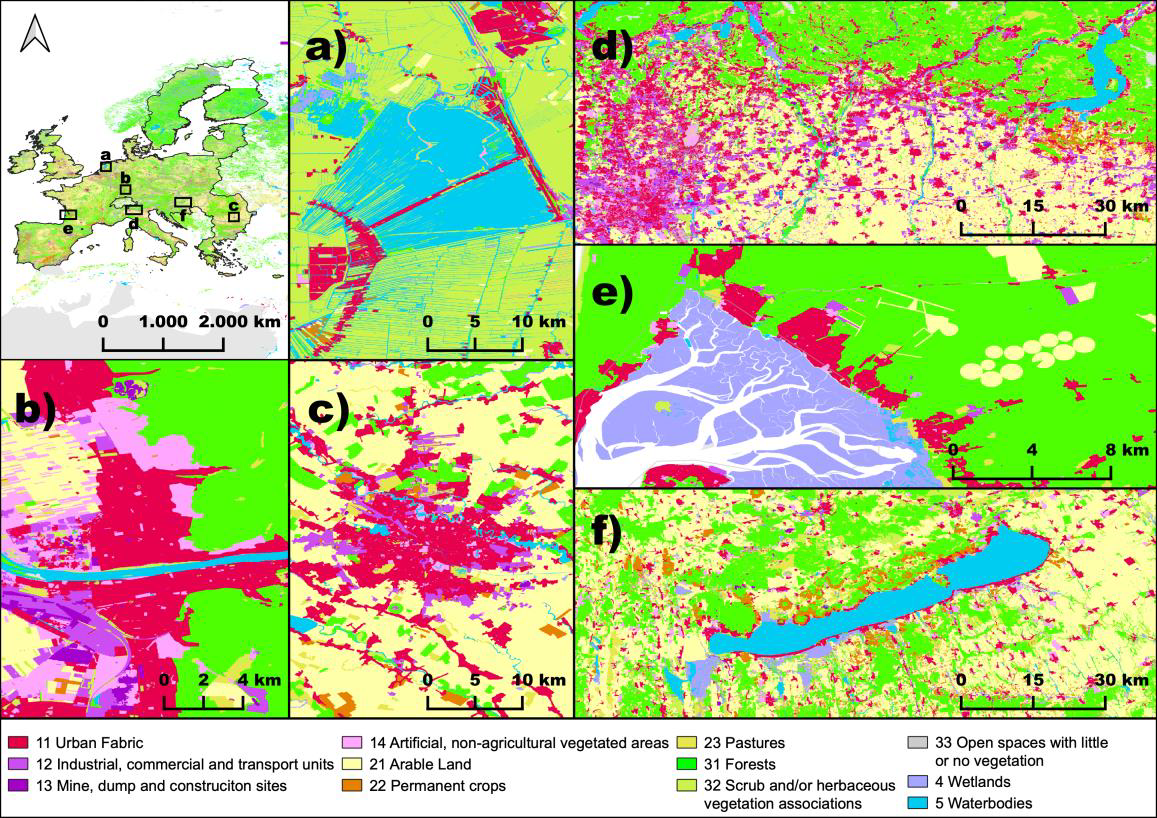
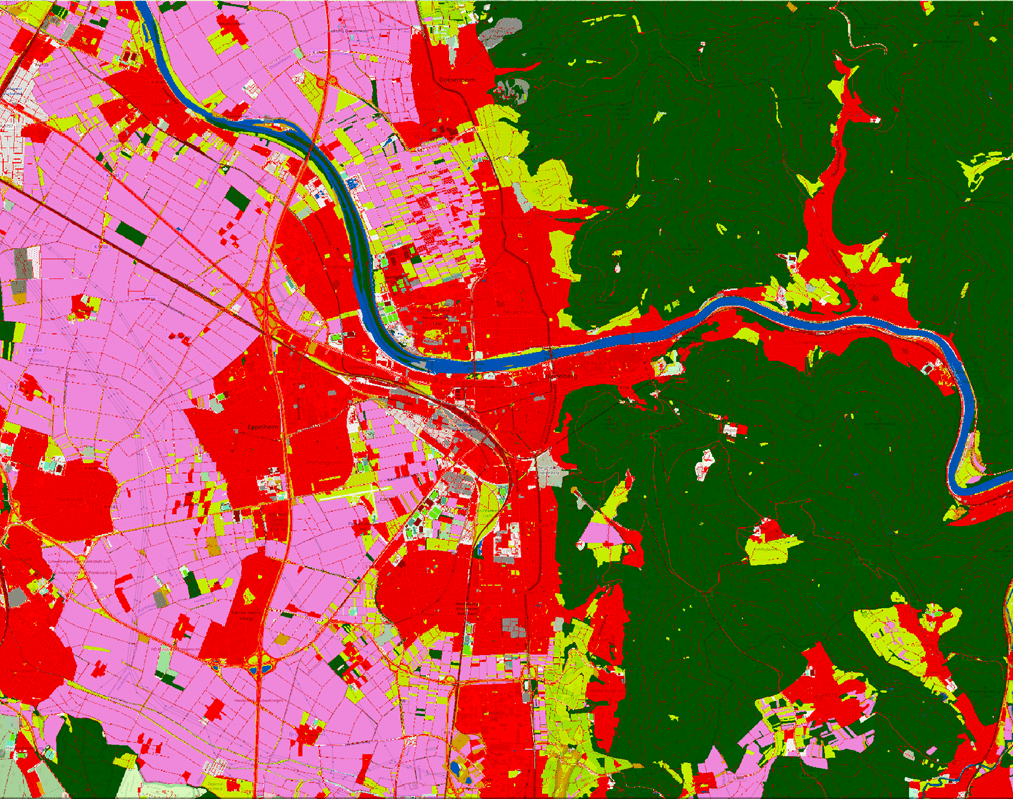
New Paper in Nature “OSMlanduse a dataset of European Union land use at 10 m resolution derived from OpenStreetMap and Sentinel-2”
The paper, published in Nature Scientific Data, presents the first high-resolution (10m or finer) land use map of the European Union derived from a large-scale fusion of OpenStreetMap (OSM) and Copernicus Sentinel-2 data. Leveraging citizen-generated data and remote sensing, the authors demonstrate a scalable and globally applicable methodology to fill thematic and spatial gaps in…
-
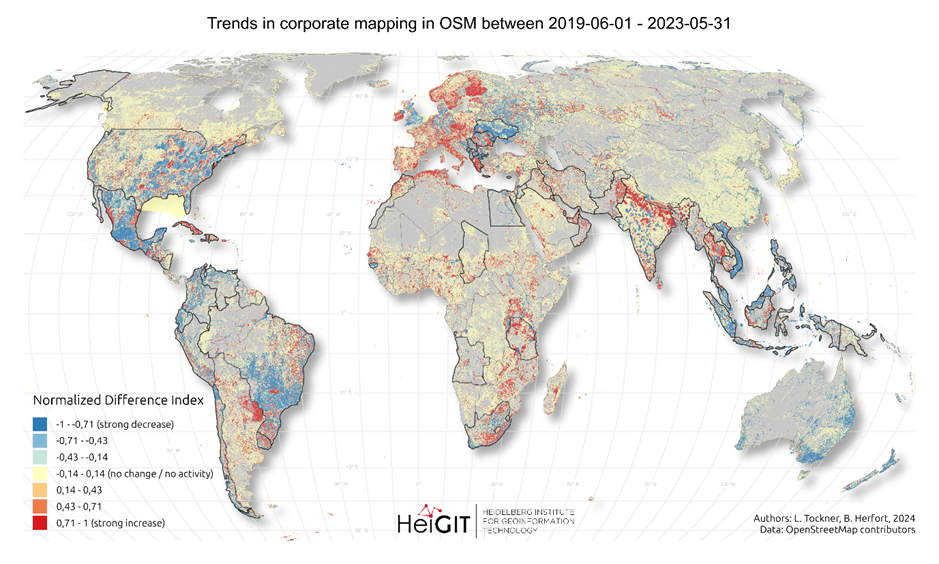
New paper “Corporate Mapping in OpenStreetMap – shifting trends in global evolution and small-scale effects”
Since 2016, corporate involvement in OpenStreetMap (OSM) has grown significantly, with major contributors such as Apple, Microsoft, Meta, and Amazon making substantial edits to the map on a global scale. These efforts have often focused on filling gaps in high- and medium-income countries, contributing to the overall growth of OSM data. However, this increasing corporate…
-

Post-doctoral Research Visit at African Institute of Mathematical Sciences (AIMS) in Cape Town
From January to March 2025, Dr. Steffen Knoblauch undertook a post-doctoral research visit at the African Institute of Mathematical Sciences (AIMS) in Cape Town, South Africa. His research focused on integrating Earth Observation data with bioacoustics, building on his PhD work in spatiotemporal mosquito monitoring for diseases such as Dengue. The primary focus of his…
-
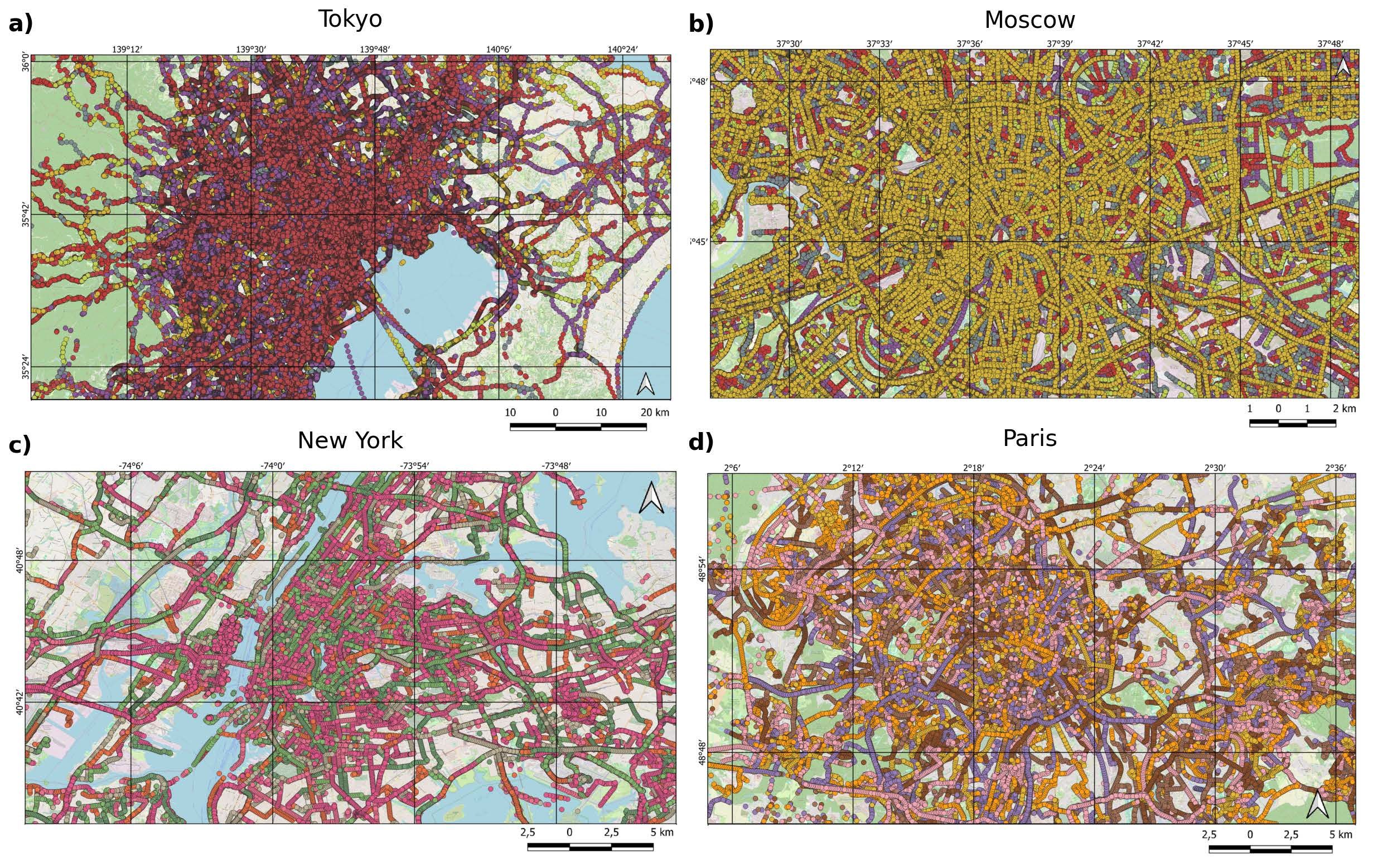
New Paper: “Paved or unpaved? A Deep Learning derived Road Surface Global Dataset from Mapillary Street-View Imagery”
The paper addresses the global shortage of detailed road surface data by leveraging street-view imagery from Mapillary and advanced deep learning techniques. Traditional datasets like OpenStreetMap (OSM) often lack comprehensive road surface attributes—with only about 30–40% coverage—hindering applications such as travel time estimation, disaster response routing, urban planning, and environmental assessments. To fill this gap,…
-
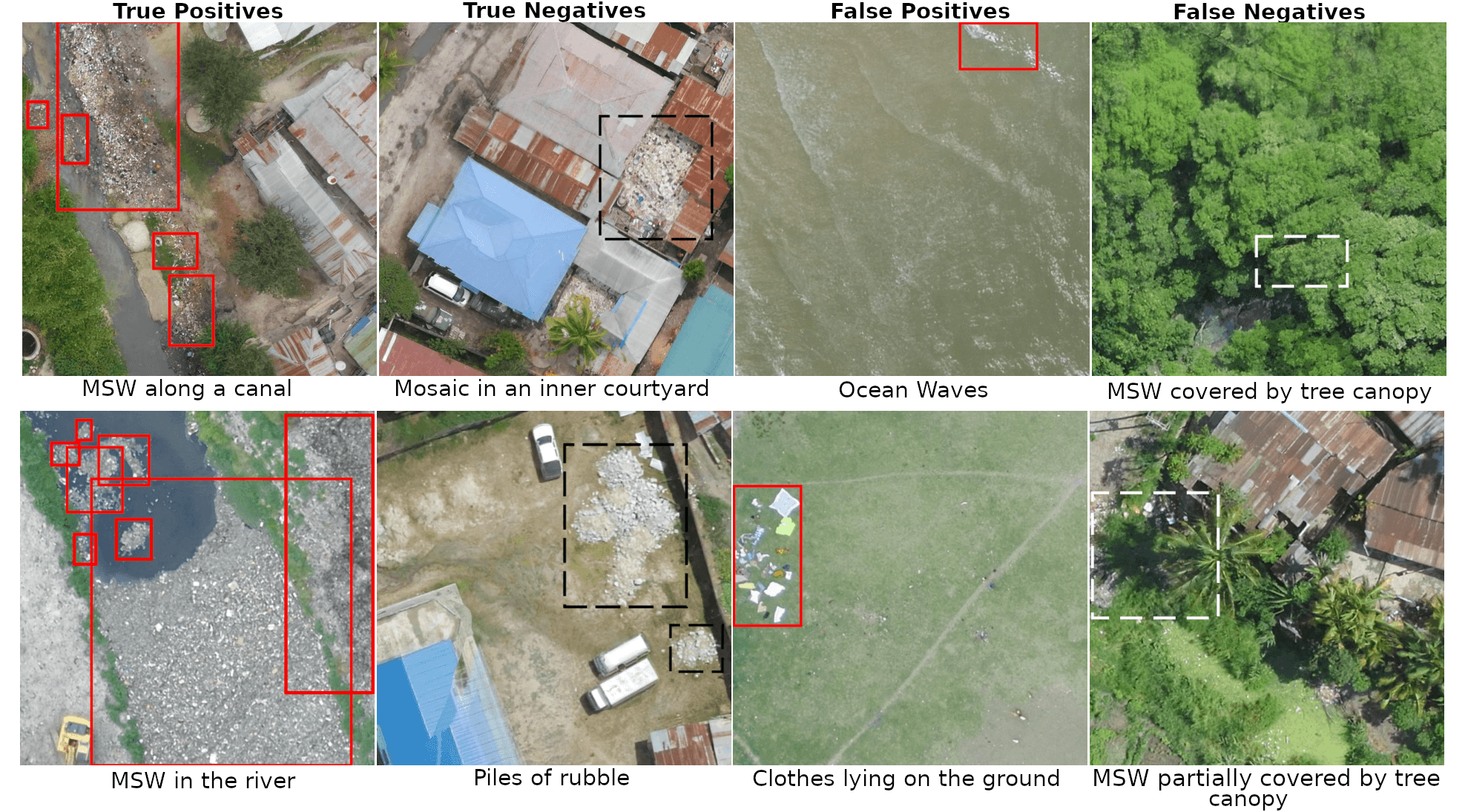
Harnessing UAV Technology to Support Municipal Solid Waste Management
The full article was originally published on geoawesome. The management of Municipal Solid Waste (MSW) represents a significant challenge, particularly in regions lacking adequate waste management infrastructure. In Africa, several regions are identified as critical hotspots for waste mismanagement. In 2012, only 55% of MSW was collected across Africa, with a mere 4% being recycled,…
-

Silver Ways: Enhancing Walkability for Older Adults in 15-Minute Cities
The 15-minute city concept is gaining traction in urban planning, aiming to ensure that essential services are within a short walk or bike ride. As the older population grows, walking remains a key factor in their well-being, yet their mobility is highly dependent on the built environment. A new research project, Silver Ways, is tackling…
-
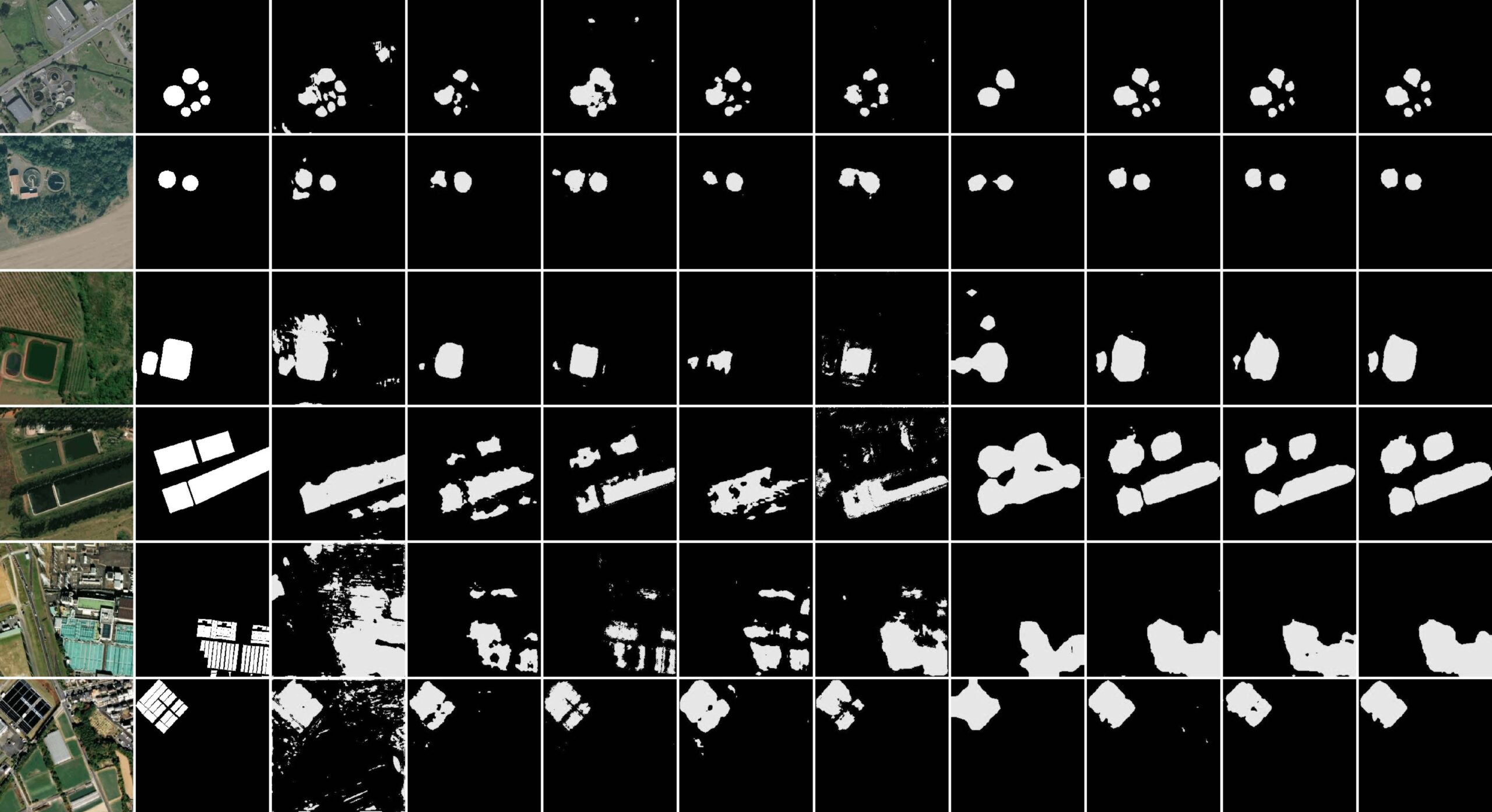
New paper “STVAE: Skip connection driven two-stream property Fusion Variational AutoEncoder for cross-region wastewater treatment plant semantic segmentation”
Wastewater treatment plants (WWTPs) play a crucial role in maintaining ecological balance and public health and are essential for advancing social sustainable development goals. However, the diverse architectural styles, scales, and environmental contexts of WWTPs—shaped by climate, topography, and regional economic conditions—pose significant challenges for generalizing segmentation algorithms. To address this, integrating knowledge from different…
-

OSM Completeness with Overture maps data
Free and open-source map data has become a keystone for research across diverse fields. The extensive coverage of OpenStreetMap (OSM) data allows scientists to conduct independent studies without relying on corporate collaborations or investing heavily in proprietary datasets. However, OSM data coverage completeness varies significantly by location. Moreover, the latest data updates cannot always be…
-
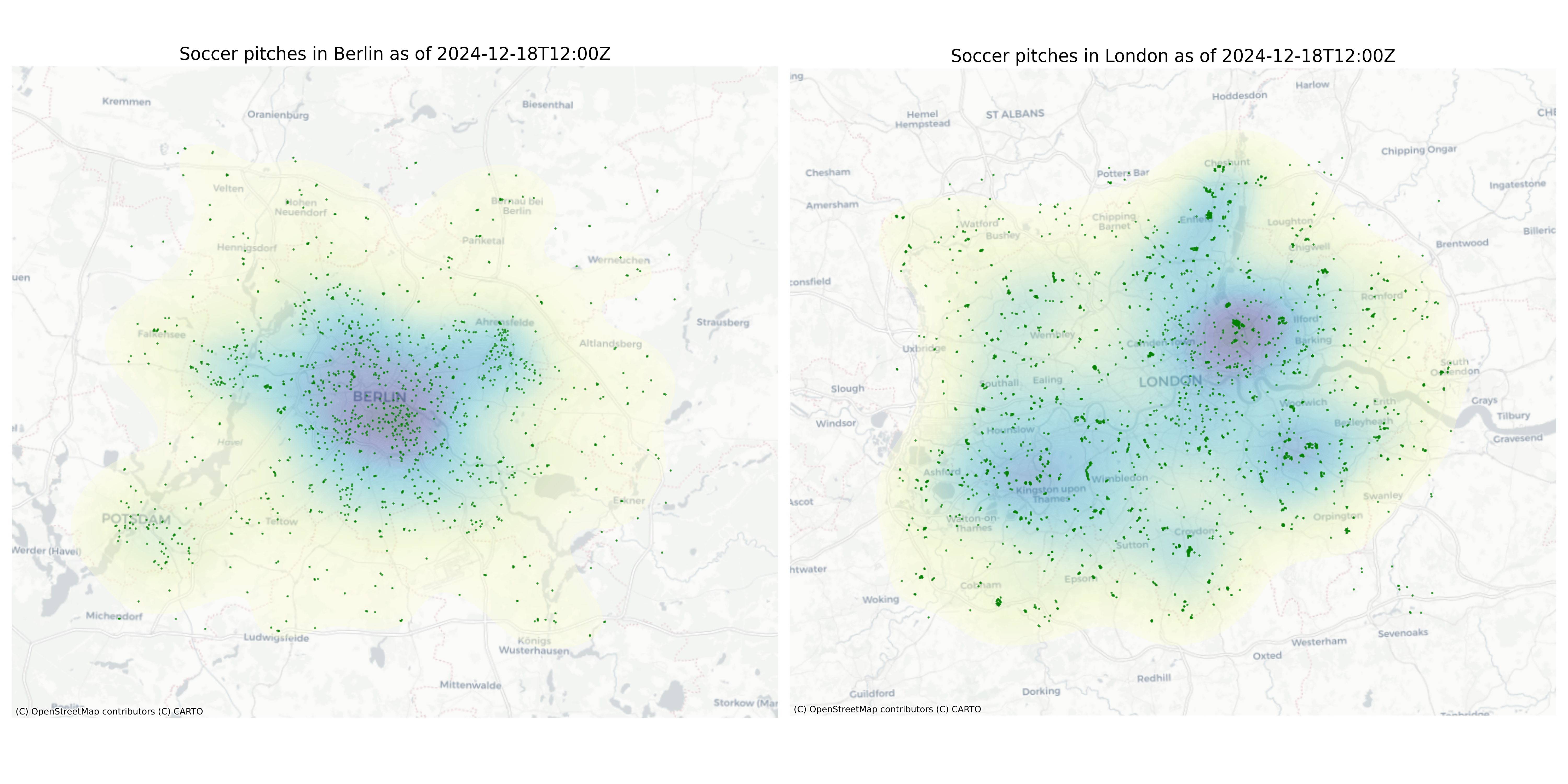
ohsome-py 4.0.0
The ohsome-py Python package is a client for the ohsome API, designed to facilitate the extraction and analysis of historical OpenStreetMap (OSM) data. The package simplifies handling API requests and responses by converting them into pandas or GeoPandas data frames, making data analysis and visualization easier. With ohsome-py, you gain all the functionalities of the…